Lab 01: Servo Modeling
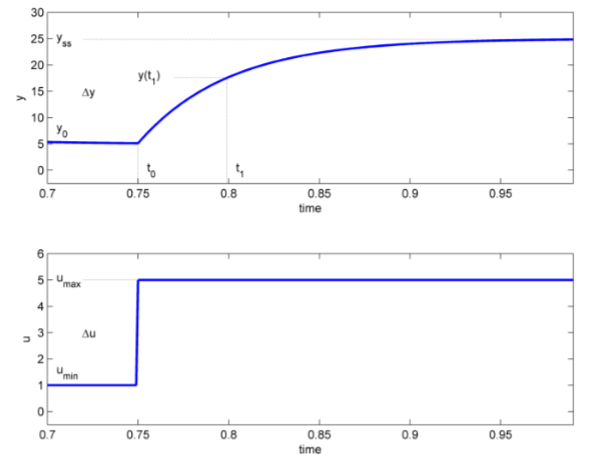
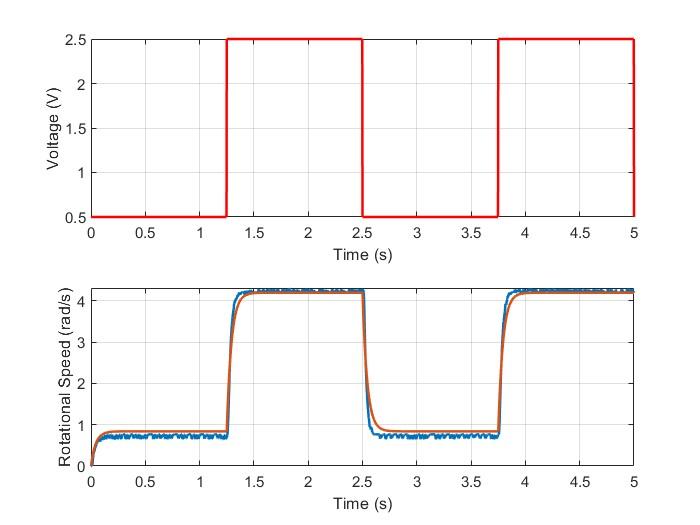
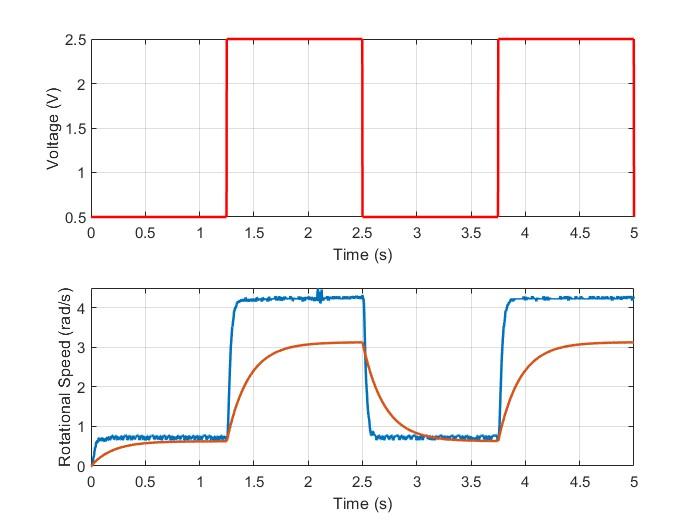
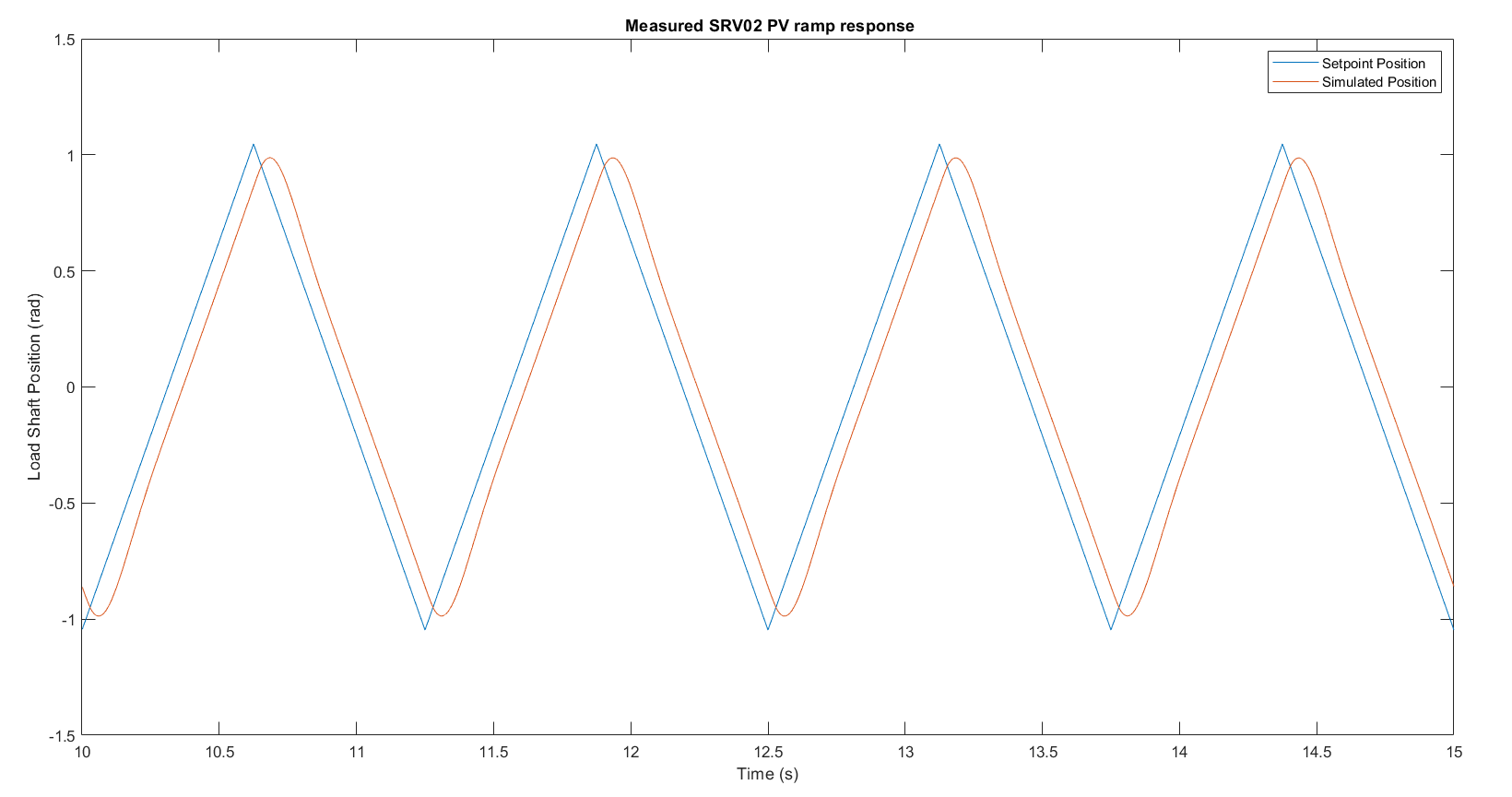
Applied a square-wave step input to the Quanser SRV02 servo-motor and recorded the load shaft speed response via MATLAB/Simulink to extract steady-state gain (K) and time constant (τ) using the bump test method. Iterated model parameters in a validation experiment; best-fit values of K = 1.68 rad/s/V and τ = 0.044 s produced near-exact agreement between simulated and measured responses.